Nelinearni dinamički sustavi
Darko Žubrinić
Zavod za
primijenjenu matematiku, FER,
Zagreb, 2020.
- Nastavno pomagalo uz kolegij Diferencijalne jednadžbe i teorija stabilnosti za studente 1. godine diplomskog studija FER-a.
- Svrha: vizualizacija faznih portreta linearnih dinamičkih sustava
- Ovo je nastavak prikaza Matrične transformacije ravnine vizualizirane i Eksponecijalna funkcija matrice i linearni dinamički sustavi
Ovo je nastavak sljedećih dvaju prikaza:
Matrične transformacije ravnine vizualizirane
Eksponecijalna funkcija matrice i linearni dinamički sustavi
Nelinearni sustavi sa spiralnim trajektorijama
U linearnim sustavima se pojavljuju samo eksponencijalne spirale. Zanimljivo je da se već kod vrlo jednostavnih nelinearnih sustava mogu pojavljivati spirale koje su sasvim drugačije od eksponencijalne spirale. U sljedećem nelinearnom sustavu, \begin{aligned} x_1'(t)&=- x_2(t)-x_1(t)\,[x_1(t)^2+x_2(t)^2]\\ x_2'(t)&=\phantom{-}x_1(t) -x_1(t)\,[x_1(t)^2+x_2(t)^2], \end{aligned} u kojem na desnim stranama imamo polinome trećeg stupnja u dvije varijable \(x_1\) i \(x_2\) (primijetite da linearni dijelovi odgovaraju točno harmonijskom oscilatoru s kružnim trajektorijama u odgovarajućem faznom portretu), nakon kraćeg računa se u polarnom sustavu \((r,\varphi)\) (koristeći \(x_1=r\cos\varphi\) i \(x_2=r\sin\varphi\)), dobiva ovakvo rješenje: $$ r(t)=(2 t+C_1)^{-1/2}, \quad \varphi(t)=t+C_2,\tag1 $$ gdje su \(C_1\) i \(C_2\) konstante.
Doista, množeći prvu jednadžbu sustava s \(x_1\), a drugu s \(x_2\), zbrajanjem dobivamo \(x_1x_1'+x_2x_2'=-(x_1^2+x_2^2)^2\), tj. \(\frac12(r^2)'=r^4\) (naime, \(r^2=x_1^2+x_2^2\)), tj. \(r'=-r^3\) (uz pretpostavku da je \(r\ne0\)). Integriranjem jednakosti \(-r^{-3}dr=dt\) odmah dobivamo \(r(t)=(2 t+C_1)^{-1/2}\).
Iz \(\varphi=\arctan\frac{x_2}{x_1}\) slijedi deriviranjem kompozicije funkcija da je \(\varphi'=\frac{(x_2/x_1)'}{1+(x_2/x_1)^2}=\frac{x_2'x_1-x_2x_1'}{x_1^2+x_2^2}=\frac{x_1^2+x_2^2}{x_1^2+x_2^2}=1\), odakle zaključujemo da je \(\varphi(t)=t+C_2\).
Eliminacijom vremenskog parametra \(t\), iz (1) dobivamo krivulju (gdje priču malo pojednostavnjujemo, odbacivanjem konstanata): $$ r=\varphi^{-1/2}, $$ za kutove \(\varphi\ge\varphi_0\), gdje je \(\varphi_0\) neki zadani pozitivna kut. Ovo je također spiralna trajektorija, ali ona nije eksponencijalnog tipa. Naime, vrijednost \(r=\varphi^{-1/2}\) puno sporije konvergira prema nuli kada \(\varphi\to+\infty\) (tj. kada \(t\to+\infty\)). Već za relativno male vrijednosti kuta \(\varphi\) (tj. nakon svega par okreta duž spirale), vrijednost od \(r\) postaje skoro konstantna, tj. trajektorija postaje skoro kružna! Pogledajte na sljedećem platnu. Ishodište je stacionarna točka, a u ovom slučaju kažemo da je ona slabi fokus.
Pogledajmo kako za ovaj dinamički sustav izgleda situacija samo s dvije različite trajektorije, što nam može pomoći da bolje razmijemo fazni portret ovog dinamičkog sustava. Fazni portret shvaćamo ga kao skup svih orijentiranih trajektorija u ravnini. Radi autonomnosti sustava, svake su dvije trajektorije ili disjuntkne, ili iste.
Za razliku od eksponencijalne spirale, spirala \(r=\varphi^{-1/2}\), koja odgovara kutovima \(\varphi\in(\varphi_0,+\infty)\), ima beskonačnu duljinu.
To je dosta lako razumjeti. Pogledajmo samo dijelove te spirale u prvom kvadratnu. Na \(x_1\)-osi ti dijelovi spirala počinju u točkama koje odgovaraju vrijednostima \(\varphi_k=2\pi k\), gdje je \(k\ge k_0\). Svaki takav dio spirale ima duljinu očevidno veću od \((2\pi )^{-1/2}\). Prema tome, duljina cijele spirale ne može biti manja od zbroja $$ \sum_{k\ge k_0}(2\pi k)^{-1/2}=(2\pi )^{-1/2}\sum_{k\ge k_0}k^{-1/2}. $$ Međutim, ova zadnji red divergira (tj. zbroj mu je beskonačan), jer radi se o Dirichletovu redu s parametrom \(p=1/2\), koji je manji od jedan. Prema tome, spirala \(r=\varphi^{-1/2}\), \(\varphi>\varphi_0\), ima beskonačnu duljinu. 😊
Isti zaključak vrijedi i za bilo koju drugu spiralu oblika \(r=\varphi^{-p}\) , gdje je \(p\in(0,1]\). Ako je parametar \(p>1\), onda odgovarajuća spirala \(r=\varphi^{-p}\) ima konačnu duljinu. To je, kao što smo vidjeli, u izravnoj vezi s divergentnošću Dirichletova reda \(\sum_{k\ge k_0}k^{-p}\) za \(p>1\). Kao što znamo, za \(p=1\) dobivamo harmonijski red, koji divergira.Ako gornji sustav zapišemo kraće kao \begin{aligned} x_1'&=- x_2-x_1\,(x_1^2+x_2^2)\\ x_2'&=\phantom{-}x_1 -x_2\,(x_1^2+x_2^2), \end{aligned} onda ga možemo shvatiti kao diferencijalnu jednadžbu \(\mathbf x'=\mathbf F(\mathbf x)\), gdje je \(\mathbf x=(x_1,x_2)^{\top}\) radius-vektor točke. U desnoj strani možemo odvojiti linearni dio (koji je blizu ishodišta dominantan) od nelinearnog kubičnog (koji je blizu ishodišta jako mali u odnosu na linearni dio): \begin{aligned} \mathbf F(\mathbf x) = \left[ \begin{matrix} -x_2\\ \phantom{-}x_1\end{matrix}\right] -(x_1^2+x_2^2) \left[ \begin{matrix} x_1\\ x_2\end{matrix}\right]= \mathbf J\mathbf x-\|\mathbf x\|^2\mathbf x. \end{aligned}
Vektor \(\mathbf J\mathbf x\) (koji je linearni dio vektorskog polja \(\mathbf F(\mathbf x)\)) djeluje tangencijalno na kružnicu na kojoj se točka nalazi, dok vektor \(-\|\mathbf x\|^2\mathbf x\) djeluje radijalno, privlačeći točku prema ishodištu. Ovaj zadnji radijalni vektor ima normu jednaku \(\|\mathbf x\|^3\), pa je po apsolutnoj vrijednosti puno manji u odnosu na njemu okomit vektor \(\mathbf J\mathbf x\) s normom \(\|\mathbf x\|\), kad je \(\mathbf x\) blizu ishodišta. Možemo zamisliti kao da se radi o kružnim trajektorijama (radi prvog vektora \(\mathbf J\mathbf x\)) koje su lagano privučene k ishodištu malim iznosom \(-\|\mathbf x\|^2\mathbf x\) (taj je kubični iznos puno manji od linearnog dijela, ako smo blizu ishodištu; na primjer unutar kruga polumjera \(1/2\) kubični dio je barem četiri puta slabiji od linearnog, a unutar kruga polumjera \(1/10\) kubični dio je barem petsto puta slabiji od linearnog). Iz tog je razloga onda jasno da će trajektorije doista biti spiralne, te da okreti postaju sve sličniji kružnicama (za razliku od eksponencijalne spirale). Pogledajte dolnje platno.
U slučaju sustava \(\mathbf x'=\mathbf J\mathbf x +\|\mathbf x\|^2\mathbf x\) imamo odbojno radijalno polje brzina, a ne privlačno. Dobivamo spiralne trajektorije (s pozitivno orijentiranim okretima), duž kojih se točka udaljuje od ishodišta, tj. spirale mijenjaju orijentaciju. Brzina udaljavanja od ishodišta sve više raste (tj. radius pripadne kružnice se sve brže povećava).
Za sustav \(\mathbf x'=-\mathbf J\mathbf x -\|\mathbf x\|^2\mathbf x\) imamo spirale s negativno orijentiranim okretima, koje se približuju ishodištu.
Za sustav \(\mathbf x'=-\mathbf J\mathbf x +\|\mathbf x\|^2\mathbf x\) imamo spirale s negativno orijentiranim okretima, koje se udaljuju od ishodišta. Ishodište je stacionarna točka, koje je nestabilna.
Za sustav \(\mathbf x'=-\mathbf J\mathbf x +\|\mathbf x\|^2\mathbf x\) dobivamo spirale s negativno orijentiranim okretima, koje se udaljuju od ishodišta. Ishodište je stacionarna točka, koje je nestabilna.
Više pojedinosti o dinamičkim sustavima pogledajte u [Korkut, Županović], te u predavanjima [Strogatza] o dvodimenzionalnim linearnim sustavima.
Radijalna vektorska polja
Ako je zadana bilo koja funkcija realne varijable \(f:(0,+\infty)\to\mathbb R\), onda možemo definirati odgovarajuće radijalno vektorsko polje \(\mathbf f:\mathbb R^2\to\mathbb R^2\) sa $$ \mathbf f(\mathbf x)=f(\|x\|)\frac{\mathbf x}{\|\mathbf x\|}, $$ gdje kvocijent \(\frac{\mathbf x}{\|\mathbf x\|}\) na desnoj strani predstavlja jedinični vektor smjera vektora \(\mathbf x\). Pritom vektor \(\mathbf x\in\mathbb R^2\) poistovjećujemo s točkom ravnine čiji je to radius-vektor (s početkom u ishodištu), dok sam vektor \(\mathbf f(\mathbf x)\) stavljamo s početkom u tu točku. Znači, vektorsko polje \(\mathbf f:\mathbb R^2\to\mathbb R^2\) točkama ravnine pridružujemo vektore koji polaze iz točaka ravnine.
Na primjer, za \(f(r)=ar\), gdje je \(a\) realna konstanta, dobivamo linearno (i radijalno) vektorsko polje \(\mathbf f(\mathbf x)=a\mathbf x\), koje smo već promatrali.
Za \(f(r)=r^3\) dobivamo vektorsko polje \(\mathbf f(\mathbf x)=\|x\|^3\frac{\mathbf x}{\|\mathbf x\|}=\|\mathbf x\|^2\mathbf x\). Pogledajmo vizualizaciju tog polja na sljedećem platnu.
Radijalni dinamički sustav oblika \(\mathbf x'=\|\mathbf x\|^2\mathbf x\), gdje je \(\mathbf x=\mathbf x(t)\) (primijetite da smo samo promijenili predznak desne strane u odnosu na predhodni primjer), u komponentnom zapisu glasi \begin{aligned} x_1'&=x_1(x_1^2+x_2^2)\\ x_2'&=x_2(x_1^2+x_2^2). \end{aligned} Sustav je odbojan s obzirom na ishodište.
Pogledajmo još kako za predhodni primjer izgleda odgovarajuće vektorsko polje, koje je radijalno.
Radijalna vektorska polja sa singularitetom u ishodištu
U ovom odjeljku radi praktičnosti rabimo pojam singulariteta vektorskog polja u drugačijem smislu nego u [Korkut, Županović] (gdje singularna točka znači stacionarnu točku, tj. ravnotežnu točku dinamičkog sustava). Za radijalno vektorsko polje \(\mathbf x\mapsto \mathbf{Fx}\) kažemo da u ishodištu ima singularitet, ako \(\|\mathbf F(\mathbf x)\|\to+\infty\) kada \(\|\mathbf x\|\to0\). (U samom ishodištu vektorsko polje nije definirano.) To će biti slučaj ako je recimo \(\|\mathbf F(\mathbf x)\|=K\|\mathbf x\|^{-2}\), kao u sljedećem primjeru.
Dobivamo dinamički sustav oblika \(\mathbf x'=\frac{K}{\|\mathbf x\|^2}\frac{\mathbf x}{\|\mathbf x\|}\), gdje je \(\mathbf x=\mathbf x(t)\) i \(K>0\).
Zapisan u komponentama, taj sustav glasi \begin{aligned} x_1'&=\frac{K}{x_1^2+x_2^2}\frac{x_1}{\sqrt{x_1^2+x_2^2}}\\ x_2'&=\frac{K}{x_1^2+x_2^2}\frac{x_2}{\sqrt{x_1^2+x_2^2}}. \end{aligned} Upravo ovakve desne strane smo koristili za prikaz vektorskog polja na gornjem platnu.
Početnu vrijednost \(\mathbf x(0)=\mathbf x_0\) biramo tako da bude \(\ne 0\) (tj. izvan ishodišta), jer u ishodištu vektorsko polje nije definirano.
Jednostavnim integralnim računom pokazuje se da je \(\|\mathbf x(t)\|=(3Kt+\|\mathbf x_0\|^3)^{1/3}\), gdje je \(t\ge0\). Posebno, \(\|\mathbf x(t)\| \asymp t^{1/3}\) kada \(t\to+\infty\) (tj. omjer lijeve i desne strane uz \(\asymp\) je između dviju pozitivnih konstanata neovisnih o \(t>0\)).
Doista, ako zraku koja spaja ishodište s točkom \(\mathbf x_0\) označimo kao \(r\)-os, onda je \(r'=Kr^{-2}\), tj. \(r^2dr=K\,dt\). Integriranjem dobivamo \(\frac13r^3=Kt+C\), a iz početnog uvjeta slijedi da je \(C=\frac 13r_0^3\), gdje je \(r_0=\|\mathbf x_0\|\) početni položaj točke na \(r\)-osi. Prema tome je \(r(t)=(3Kt+r_0^3)^{1/3}\). Upravo ova formula nam je poslužila za crtanje trajektorija na gornjem platnu.
Fazni portret ovog sustava sastoji se od radijalnih zraka, orijentiranih prema ishodištu. Jednostavnim integralnim računom pokazuje se da je \(\|\mathbf x(t)\|=(3Kt+\|\mathbf x_0\|^3)^{1/3}\), gdje je \(0\le t\le -\frac1{3K}\|\mathbf x_0\|^3\) (podsjećamo da je konstanta \(K\) negativna). Svaka točka \(\mathbf x_0\ne0\) kroz konačno vrijeme \(t=-\frac1{3K}\|\mathbf x_0\|^3\) "udari" beskonačnom brzinom u ishodište. U ishodištu vektorsko polje nije definirano, pa se ne može govoriti o stabilnosti ishodišta.
U svim primjerima u ovom i predhodnom odjeljku riječ je o radijalnim dinamičkim sustavima oblika \(\mathbf x'=g(\|\mathbf x\|)\,\mathbf x\), pri čemu je funkcija \(g:(0,\infty)\to\mathbb R\) uvijek istog predznaka: bilo pozitivnog bilo negativnog. U ta dva slučaja imamo ili odbojno ili privlačno radijalno polje. Jasno je da su trajektorije iste kao i u najobičnijim linearnim sustavima \(\mathbf x'=\mathbf x\) i \(\mathbf x'=-\mathbf x\) (gdje je \(\mathbf A=\pm\mathbf I\)), kakve smo promatrali na početku ovog priloga (\(\mathbf x'=\mathbf A\mathbf x\), za matrice \(\mathbf A\) oblika \(a\mathbf I\)). Trajektorije su iste, ali radijalna brzina nije ista (međutim je istog predznaka i za nelinearni i za njemu pridružen linearni sustav, u kojem smo samo ispustili \(g(\|\mathbf x\|)\), osim njegova predznaka).
Vektorsko polje indeksa \(n\)
Već smo vidjeli primjer vektorskog polja indeksa \(1\) (cirkularno vektorsko polje, radijalno vektorsko polje), kao i primjer vektorskog polja indeksa \(-1\) (hiperboličko vektorsko polje).
Kako bismo konstruirali vektorsko polje bilo kojeg zadanog indeksa \(n\in\mathbb Z\)? U tome nam mogu pomoći funkcije kompleksne varijable. Ako označimo sa \(z=x_1+x_2i\in\mathbb C\) kompleksni broj koji odgovara točki \((x_1,x_2)\) u ravnini, onda će funkcija kompleksne varijable $$f(z)=z^n$$ generirati vektorsko polje sa željenim svojstvom. Doista, ako u Gaussovoj ravnini gledamo kompleksni broj \(e^{i\varphi}\) na jediničnoj kružnici (koji obilazi kružnicu jednom u pozitivnom smjeru, kada \(\varphi\in[0,2\pi\)), onda je radi Eulerove formule $$ f(e^{i\varphi})=(e^{i\varphi})^n=e^{in\varphi}, $$ pa dobivamo \(n\) odgovarajuíh okreta u Gaussovoj ravnini oko ishodišta (i to u pozitivnom smjeru ako je \(n\) pozitivan cijeli broj, a u negativnom ako je cijeli broj \(n\) negativan). Drugim riječima, jednom okretu kompleksnog broja \(z\) oko ishodišta u pozitivnom smjeru, odgovara \(n\) okreta kompleksnog broja \(f(z)=z^n\) oko ishodišta (u smjeru određenom predznakom broja \(n\)).
Prema tome, ako definiramo \(u(x_1,x_2)\) kao realni dio od \(z^n\), a \(v(x,y)\) kao imaginarni dio od \(z^n\), onda će vektorsko polje \((x_1,x_2)\mapsto(u(x_1,x_2), v(x_1,x_2))\) imati analogno svojstvo, tj. bit će indeksa \(n\) u odnosu na ishodište.
Na primjer, budući da za \(n=2\) vrijedi \((x_1+ix_2)^2=(x_1^2-x_2^2)+2x_1x_2i\), dobivamo kao odgovarajuće vektorsko polje \((x_1, x_2)\mapsto(x_1^2-x_2^2, 2x_1x_2)\), koje je indeksa \(2\). To nam zorno pokazuje sljedeće platno, kojim smo vizualizirali to vektorsko polje.
Ako je cijeli broj \(n\) negativan, onda uporabom konjugirano-kompleksnog broja \(\overline{z}\) možemo pisati $$f(z)=z^n=\frac1{z^{|n|}}\frac{\overline{z^{|n|}}}{\overline{z^{|n|}}}=\frac{\overline{z}^{|n|}}{|z|^{2|n|}}$$ Budući da je \(|z|^{2|n|}>0\) za sve \(z\ne 0\), zaključujemo da za \(n<0\) vektorska polja generirana (odvajanjem realnog i imaginarnog dijela) sa \(z^n\) i \(\overline {z^{|n|}}\) imaju iste indekse u odnosu na ishodište.
Umjesto da za \(n=-2\) računamo realni i imaginarni dio od \(1/z^2\), dovoljno je u predhodnom primjeru gledati "konjugirano kompleksno" polje, u kojem samo promijenimo predznak druge komponente: $$(x_1,x_2)\mapsto(x_1^2-x_2^2,-2x_1x_2).$$ Ovo je vektorsko polje indeksa \(-2\) u odnosu na ishodište, što nam zorno pokazuje sljedeće platno.
Možemo se lako uvjeriti da se za \(n=-1\), tj. preko \(f(z)=z^{-1}\) dobiva hiperboličko vektorsko polje. Budući da je \(\frac 1z=\frac{x_1-ix_2}{x_1^1+x_2^2}\), dovoljno je gledati vektorsko polje \(u(x_1,x_2)=x_1\) i \(u(x_1,x_2)=-x_2\). To je doista hiperboličko polje, koje smo već promatrali ranije.
Pogledajmo polinomijalno polje indeksa \(3\), generirano sa \(f(z)=z^3=(x_1+ix_2)^3\). U ovom vektorskom polju \((x_1,x_2)\mapsto(u(x_1,x_2),v(x_1,x_2))\) je \(u=\mbox{Re}(z^3)=x_1^3-3x_1x_2^2\) i \(v=\mbox{Im}(z^3)=3x_1^2x_2-x_3^3\). Uvjerite se na sljedećem platnu da je indeks tog polja odnosu na ishodište jednak \(3\).
Zanimljivo je da ako mišem napravimo okret točke od trećine punog kuta (tj. \(2\pi/3\)) radijana oko ishodišta (tj. \(\frac{\pi}2+\frac{\pi}6\)), onda strjelica vektorskog polja napravi jedan puni okret. To je naravno posljedica Eulerove formule.
Pogledajmo još vektorsko polje indeksa \(-3\) u odnosu na ishodište. Dobijemo ga tako da jednostavno promijenimo predznak druge komponente vektorskog polja u predhodnom primjeru (tj. konjugiramo kompleksni broj \(z^3\)).
Kako izgledaju trajektorije dinamičkog sustava opisanog sa \begin{aligned} x_1'&=u(x_1,x_2)\\ x_2'&=v(x_1,x_2), \end{aligned} u četiri predhodna slučaja, gdje su \(x_1=x_1(t)\), \(x_2=x_2(t)\) nepoznate funkcije? Odgovor na to pitanje daje nam sljedeća fotografija, objavljena u članku [Scheuermann, Hagen, Krüger, Menzel, Rockwood]:
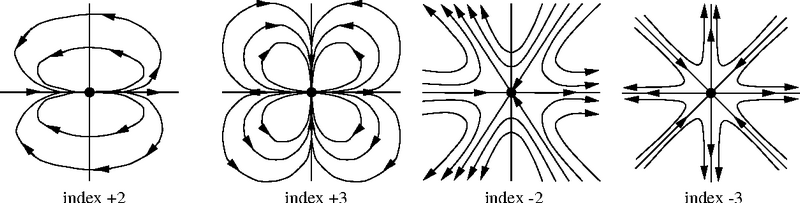
Možete sami za vježbu nazrijeti ove trajektorije, slijedeći tok vektorskog polja na gornja četiri platna. Naravno, iste takve trajektorije imaju i rješenja jednadžbe \(z'=z^n\) u Gaussovoj ravnini, za \(n=2,\,3,\,-2,\,-3\), gdje je \(z=z(t)\).
Pojam indeksa postaje još jasniji ako na platnu crtamo radius vektor točke, a odgovarajuće vektorsko polje crtamo ne iz te (pomične) točke, nego iz ishodišta. Taj vektor ostavljamo u crvenoj boji. Time vektorsko polje više nije prikazano na uobičajen način, kada početak vektora stavljamo u točku u kojoj se on izračunava. Radi toga govorimo o vektorskom preslikavanju, umjesto o vektorskom polju.
Ako platno gledamo kao Gaussovu (kompleksnu) ravninu, onda se kompleksni broj \(z\) preslikava u \(z^2\).
Ovime smo vizualizirali pridruživanje \(z\mapsto \overline{z^2}\), pri čemu su vektori (kompleksni brojevi) \(\overline{z^2}\) ne samo paralelni, nego i iste orijentacije kao i \(1/{z^2}\). Prema tome, pridruživanje \(z\mapsto 1/{z^2}\) u Gaussovoj ravnini ima također indeks \(-2\) u odnosu na ishodište.
Gledajući u Gaussovoj ravnini, ovo predstavlja vizualizaciju pridruživanja \(z\mapsto z^3\), koje je indeksa \(3\) u odnosu na ishodište.
Pogledajmo još vektorsko preslikavanje indeksa \(-3\) u odnosu na ishodište. Dobijemo ga tako da jednostavno promijenimo predznak druge komponente vektorskog polja u predhodnom primjeru.
Gledajući u Gaussovoj ravnini, ovo predstavlja vizualizaciju pridruživanja \(z\mapsto \overline{z^3}\), koje je indeksa \(-3\) u odnosu na ishodište. Vektori \(\overline{z^3}\) su ne samo paralelni, nego i iste orijentacije, pa i pridruživanje \(z\mapsto 1/z^3\) ima indeks jednak \(-3\) u odnosu na ishodište.
U predhodnom primjeru, ishodište je polustabilna točka (s lijeve strane od ishodišta vektorsko polje brzina je privlačno prema ishodištu, dok je s desne strane odbojno od ishodišta):
- na vodoravnoj osi, ishodište je stabilna točka s obzirom na lijevu poluos (tj. ako je \(z_0\) početna točka lijevo od ishodiše, onda se ona s vremenom približava prema ishodištu),
- na vodoravnoj osi, ishodište je nestabilna točka s obzirom na desnu poluos (tj. ako je \(z_0\) početna točka desno od ishodišta, onda se ona s vremenom udaljuje od ishodišta duž te osi).
Opišimo vrlo kratko kako je dobivena dinamika vidljiva na gornjem platnu. Pišući diferencijalnu jednadžbu \(z'=z^2\) (u skupu kompleksnih brojeva!) kao \(z^{-2}dz=dt\), integriranjem dobivamo \(-z^{-1}=t+C\), gdje je \(C\) neka konstanta (kompleksni broj!). Za zadani početni uvjet \(z(0)=z_0\ne0\) dobivamo kao rješenje \(z(t)=(z_0^{-1}-t)^{-1}\). Odgovarajuća realna rješenja \(x_1(t)\) i \(x_2(t)\) dobivamo kao realni i imaginarni dio od \(z(t)\), jer je \(z(t)=x_1(t)+i\,x_2(t)\). Početna vrijednost \(z_0\) zadaje se strjelicom miša na platnu (kada pritisnemo tipku miša), a položaji \(z(t)\) izračunavaju se 'pod platnom' (tj. u Vašem računalu) od trenutka \(t=0\) do momenta odpuštanja tipke miša.
Kao što vidimo na temelju opisa dinamike, trajektorije rješenja jednadžbe \(z'=z^2\) na gornjem platnu nalikuju na trajektorije oko dipola (na primjer električkog dipola učvršćenog u ishodištu, tipa \(-+\), vodoravno usmjerenog, koje djeluje na slobodnu česticu pozitivnog naboja, čiji početni položaj na platnu zadajemo strjelicom miša). Iako trajektorije izgledaju "realistično", brzine očevidno nisu realistične. Naime, blizu ishodišta bi vektor brzine velikog iznosa, a na većoj udaljenosti sve manji (a ne obratno).
Literatura
- Neven Elezović: Kompleksni brojevi, Element, Zagreb
- Neven Elezović, Andrea Aglić Aljinović, Darko Žubrinić: Linearna algebra, Element, Zagreb 2020.
- Luka Korkut i Vesna Županović: Diferencijalne jednadžbe i teorija stabilnosti, Element, Zagreb 2009.
- Steven Strogatz (istaknuti stručnjak za dinamičke sustave): Two dimensional linear systems, video snimak predavanja, traje 1 sat i 15 min.
- Steven Strogatz: Nonlinear dynamics and chaos [PDF] (za ambicioznije);
video snimci predavanja:
- 1. dio (uvod)
- 2. dio (jednodimenzionalni sustavi)
- svih 25 predavanja
- Gerik Scheuermann, Hans Hagen, Heinz Krüger, Martin Menzel, Alyn P. Rockwood: Visualization of higher order singularities in vector fields, 1997 Computer Science Proceedings. Visualization '97
Matematika za osnovne i srednje škole
Matematičke šaleHistory of Croatian science
Školovanje Nikole Tesle u Hrvatskoj